In unserer Garage stehen vorne Fahrräder und dann das Auto. Um möglichst viel Platz zu schaffen, ist es sinnvoll das Auto möglichst nahe am Tor zu parken. Das hatten wir bislang immer mit einem an einer Schnur befestigten Petling gemacht, der von der Decke hing und an den dann die Windschutzscheibe stieß. Aber die Schnur längte sich mit der Zeit - unpräzise - und es war langweilig. Elektronik musste her. Ein Ultraschallsensor in Verbindung mit einem Atmel Attiny24 wurde zum elektronischen Abstandhalter. Warum einfach machen, wenn' s auch kompliziert geht.
Es funktioniert hervorragend! Hätte ich nicht gedacht. Sehr präzise.
Quelltext in Bascom
Im Quelltext ist eine weitere Funktion implementiert, die einem Raspberry Pi ein Signal gibt, wenn ein Fahrzeug in der Garage steht. Dieser Status wird über einen Webserver zur Verfügung gestellt (auf dieser Seite nicht beschrieben). Um ein Zappeln dieses Status' zu verhindern, z.B. wenn die Garage leer ist (kein eindeutiges Echo vom Ultraschall= "grün" und "rot" wechseln ständig zwischen 1 und 0), muss das "grün"-Signal einige Zeit konstant anstehen, damit es an einen Raspberry weitergemeldet wird (vgl. "Fahrzeugstatus" im Quelltext - ist eigentlich selbsterklärend). Diese Funktion wird für das Stoppen aber nicht benötigt
Der Prototyp mit Magneten am Öffner befestigt zum Testen:


Grün bedeutet Parkposition, Gelb bedeutet noch nicht ganz reingefarhren, rot bedeutet zu weit.
Beim Einfahren blinken rot und grün gleichzeitig. Beim Annähern leuchtet dann die gelbe LED, beim Erreichen der richtigen Position dann die grüne und wenn man weiter fährt kommt die rote dazu.
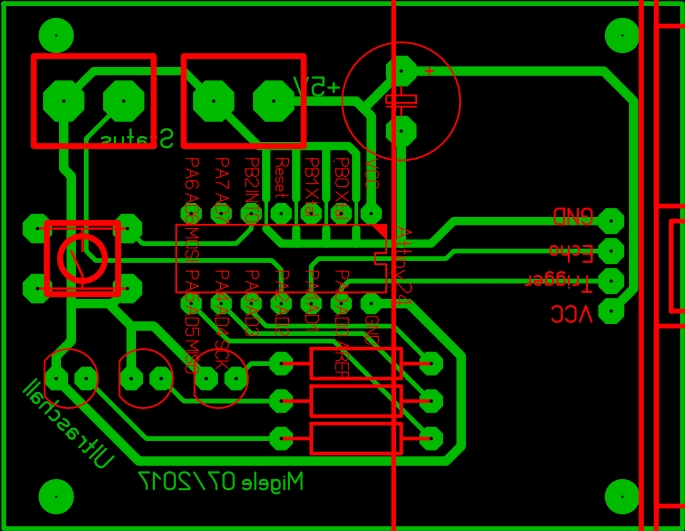
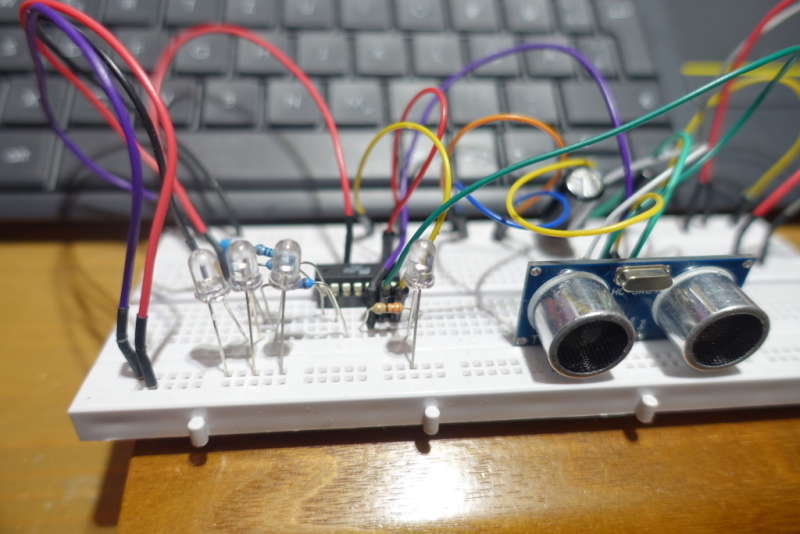
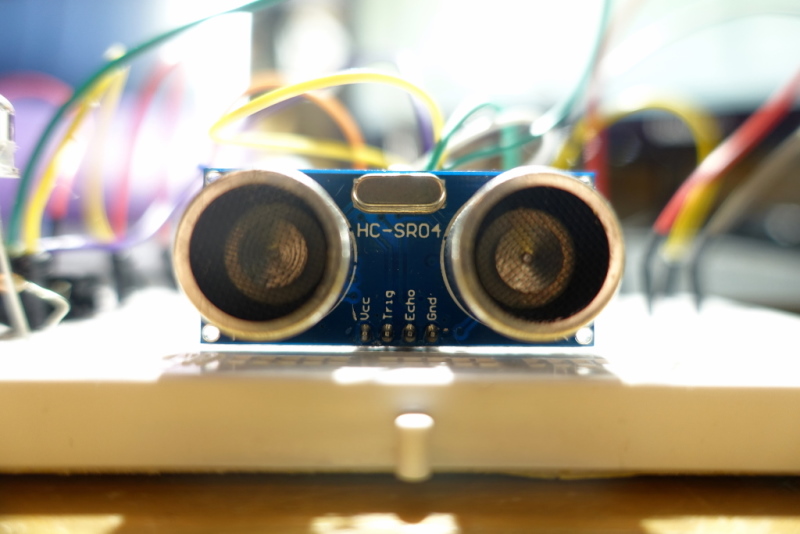
Hier ein paar Impressionen vom Testen auf dem Steckbrett und die Platine:

Die Platine: